Services
Reindeere is developing a robotic platform to perform two main tasks in
residential and commercial facilities. This product line is referred to as the
facility service assistant. The purpose of this assistant is to make various
activities on the property more productive.
The two tasks our assistant will be capable of are parking enforcement and
mobile patrol.
If you currently perform either of these services, let us give you a demonstration.
Contact us at
info@reindeere.ca
or our social media channels.
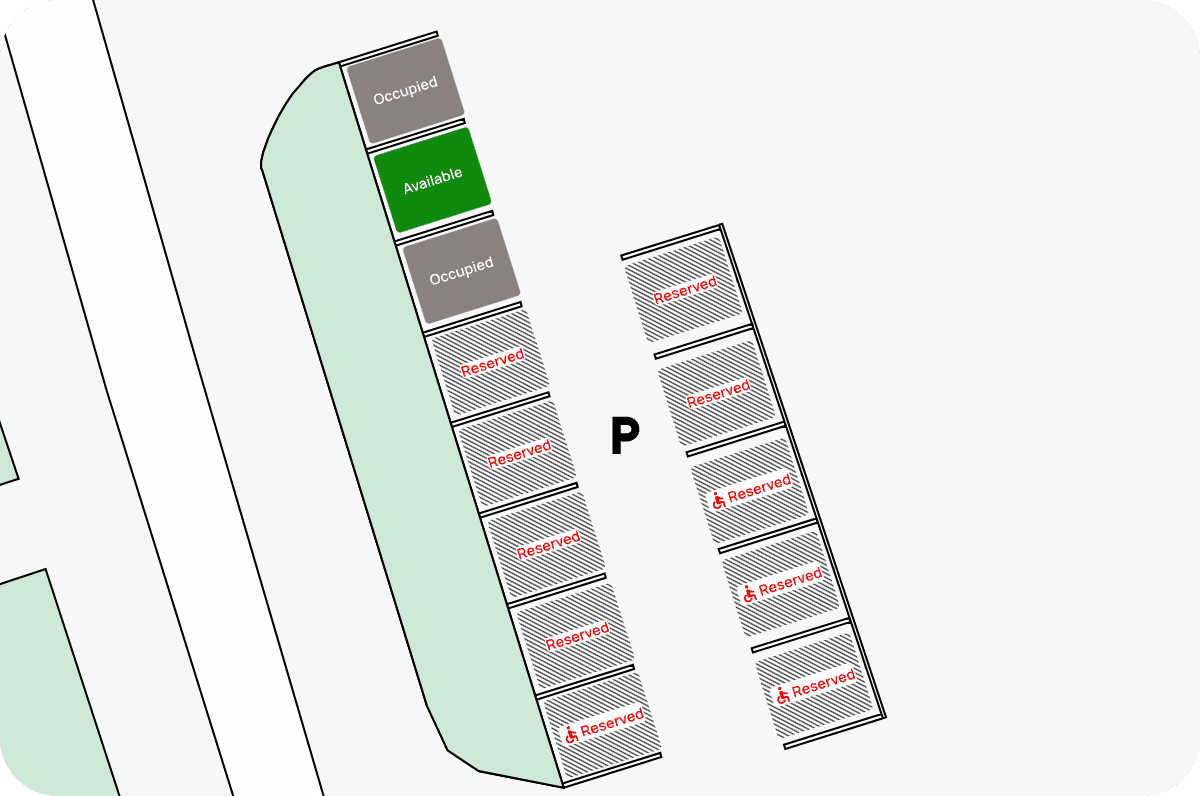
Parking Enforcement
In this task, the autonomous robot gathers relevant information on parking violations in the facility.
As a result, the enforcement officer only visits the properties with violations, which increases
productivity and reduces carbon emissions.
Here are some essential features of the task:
Feature 1
Via the Reindeere web app, the facility highlights unreserved stalls on their property or approves Reindeere's AI-based selection.
Feature 2
Drivers use the web app to find available stalls, register their vehicles for parking, or pay parking fines.

Feature 3
A robot equipped with advanced sensors patrols the parking lot and files reports of unregistered vehicles in preparation for the parking enforcement officer.

Feature 4
The web app directs the officer to visit only the properties with violations, considerably minimizing the time (and cost) spent enforcing each property.

Mobile Patrol
Like parking enforcement, the mobile patrol task uses sensors onboard the robot to gather relevant information on the facility's condition and potential risk to its inhabitants. This task will alert personnel to evidence-backed issues on the property, summoning humans only when their expertise is needed. Here are some scenarios where the task will provide value:
Scenario 1. One of the primary functions of the mobile patrol service is facility inspection. In this scenario, one or more robots survey the grounds, flagging potential safety and regulatory risks. The robot then relays the information gathered from these inspections to security personnel and management for action. In this scenario, the robot also acts as a deterrent to would-be burglars.

Scenario 2. Another crucial element of mobile patrol is inspecting ingress and egress points. Each door on the premises is checked for proper latching to ensure the security of inhabitants and their belongings.

Scenario 3. The robot also provides a source of information and support to a facility's inhabitants. While performing its tasks, the robot can be hailed in an emergency to connect those needing help with a live security officer.

About Us
Reindeere's purpose is to save others time and effort
so they can maximize their productivity and competitive advantage.
We are Canadians working for Canadians and are determined
to make our contributions safe, reliable and valuable.

Market Opportunity
Our emphasis on productivity stems from the influence technologies like the automobile
and the smartphone have had on our lives.
The next frontier is artificial intelligence (AI). Still, we believe that hardware through
robotics is how AI can enable us to accomplish our physical goals.
We have identified three significant opportunities in this field that we are aiming to capture.
They are the increasing acknowledgement of robotics, the demand for solutions to tackle labour challenges, and the proliferation of artificial intelligence models.
Facility services is a market that could benefit from robotics, given its manual
and time-consuming job functions. Increasing productivity here will further improve
market opportunity and quality of service for the stakeholders.

Vision
The robotics industry is still in its infancy compared to where we know it could be.
When commercially viable phones were released, they could only do one or two things; now, we use our smartphones for everything.
Reindeere wants to build a future where, like smartphones,
humans determine what tasks they want their robot to perform, thereby staying in control of what the robots are capable of.
